The Race to Alaska (R2AK) is an unusual 1200 km “adventure” in which any type of boat — from stand-up paddle board to 70′ foiling trimaran this year! — aspires to be the first to reach Ketchikan, Alaska, under wind- or human-power. The rules are very simple: no motors aboard; no support other than what’s available to everyone; and no adding or changing crew. The full race starts in Victoria, B.C. a few days after a shorter race from Port Townsend, Washington, to Victoria which serves as a qualifier for the full race.
Below is a quick “guide” to key web sites and extra information about the R2AK 2016. (It’s also available as a Google document and PDF for easy editing and printing…)
Schedule:
2016 Qualifier: starts on Thursday 6/23 at 6 a.m. in Port Townsend, WA. Must reach Victoria Harbor by noon on Friday 6/24.
2016 Full race: starts on Sunday 6/26 at noon in Victoria, B.C. Must transit Seymour Narrows and Bella Bella en route to Ketchikan, AK.
An interesting aspect of helping Matt build his Race to Alaska boat is learning from him, the boat designer Rick Willoughby, and other contributors how important aero- and hydrodynamics are to creating an efficient boat. When you can only provide ~250 watts of propulsion power (or 500 in Matt’s case), rather than the normal 3600 watts you get from a 5 hp outboard, you need to minimize drag in order to attain admirable boat speeds.
Matt’s boat is version 16 of a pedal boat designed by Rick. This V16 R2AK is modified for the Race to Alaska in many ways, but one key one is the canting daggerboards. These foils are designed to be elevated above the waterline so that Matt can pedal without any water drag from them, and then lowered during sailing to to provide lateral resistance and lift that helps keep the boat from heeling.
When lowered to the maximum angle of about 55 degrees below horizontal, the leeward daggerboard will help with upwind performance. On a reach it could be raised to provide more lift, while on a run it can again be pulled up clear of the water.
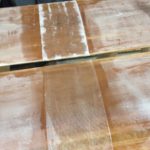
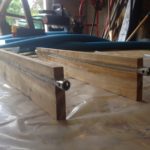
Here are some photos of the dagger boards — both during construction and initial sea trials.
10 cm 4oz glass tape reinforces area where strut will be through-bolted.
Sanding down the tape.
Fairing the taped area.
Painting the faired boards.
Over-drilled holes filled with epoxy-silica mix.
The hinge that will hold the dagger board at the ama (aka stabilizer).
The hardware that will create a pivot point where the strut joins the middle of the board.
Checking clearance of the hinge which is designed to have leading edge break away from hinge in a collision and pivot backwards. Luckily I didn’t have to bevel the trailing upper corner as there was no conflict with the hinge pivot nuts.
I’m using the strut pivot as a 6mm “nut” since I didn’t have any spares in the shop.nut
First coat of white glossy Rustoleum going on.
The board at Matt’s garage getting fitted to the ama. The leading upper corner is secured with a quick-tie that is strong enough to hold during regular sailing, but weak enough to break if the board collides with a massive object (deadhead; rock; whale)…
We used fender washers to spread the strut loads out over both the epoxy-silica bushing and the surrounding fiberglass.
The strut attached (but not yet faired) as we adjusted it’s length to get the maximum possilble down angle, but still be able to raise the board clear of the water.
We ended up deciding to shorten the struts from about 63 cm to 58.5 cm LOA. This allows the struts to come up above the water line (and hopefully many of the smaller waves) and be lowered down to near 55 degrees below horizontal.
Here are the struts after being shortened experimentally to about 60 and 58.3 cm LOA…
It was clear during testing in the lake that the bare aluminum struts were creating a LOT of drag. Rick explained that fairing them (with a symmetrical foil shape) would reduce the drag by about a factor of 20. Sailing with them immersed was equivalent to pulling a second Rouleur hull behind us!
Here are a few more photos of the fairing of a second set of struts (made with slightly thicker walled aluminum tubing, too, I think). This set was faired with cedar, though we may fair the original tube with foam insulation to have a backup (lighter duty) second pair.
Rick’s clamp that allows the strut to be set at different heights. The jaw is tightened by turning the eye-nut by hand.
We noticed some wear in the hole in the aluminum tube…
…and some in the aluminum jaw…
Matt checking lenths and angles.
Scott’s method of rounding out the cedar to accepte the sanded rough aluminum tubing.
This is the foil cross-section we’re after.
Carefully glued up (late at night without enough thought regarding how these are to be pivoted).
Staring the carving of the cedar (with hand plane, surform, and then sand paper.
Fairing the low points adjacent to the tube.
The foils after final sanding.
Preparing to glass with ~4oz cloth. Cora was a great help wetting out with System Three Silvertip.
The astute reader will notice that I drilled the holes 90 degrees off in the ends of the struts! This was remedied by re-squeezing the ends (I did this in the vice already without cracking any epoxy, thankfully) and re-drilling (much easier to line up the holes when you’ve got the faired foil shape behind the bit in the drill press!). Any strength lost from the initial errant holes I hope to regain by injecting silica-epoxy plugs 2-3 cm into the tube ends.
I’m excited to see what these faired struts do for Rouleur’s speed. So far she’s not quite attained the sailing speeds that Rick expects from his modeling…
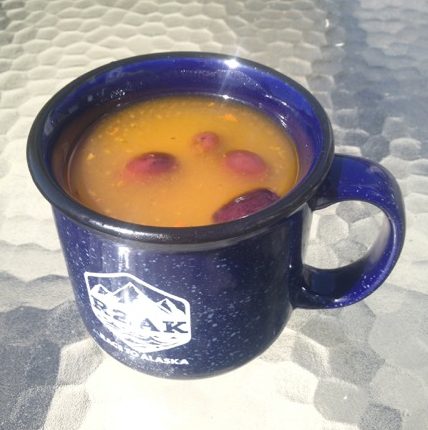
With two weeks to go before the start of the 2016 Race to Alaska (R2AK), I thought I’d share my favorite meal from my 14 day experience in the 2015 Race: “Can-do couscous.” This <10-minute meal delivers a powerful combination of carbohydrates, fats, and flavor that will warm your core and keep you energized (9.2 MJ, or 2,200 Calories). Mixed with 250 ml water it’s reminiscent of a puttanesca pasta; with 500 ml it’s a Mediterranean minestrone.
R2AK Recipe: Can-do couscous
Scott Veirs, Team Searunners, 2015
Total energy: 2209 Cal or 9.2 MJ
Total mass (dry): 484 g
Energy density (aka specific energy): 19.0 MJ/kg (= 19.0 kJ/g)
Ingredients:
250 ml couscous — 640 Cal
100 ml olive oil — 800 Cal
100 ml powdered Parmesan cheese — 133 Cal
50 ml kalamata olives — 180 Cal
50 ml sun-dried tomatoes (in oil) — 366 Cal
5 ml Better than Boullion (vegetarian flavor) — 10 Cal
Mix all ingredients except couscous
Add mixture to couscous in a Ziploc bag
Store in cool place (we used our bilge) until really hungry
Boil 500 ml freshwater (took ~1.5 minutes in our Jetboil)
Squeeze, pour, spoon mixture from bag to 1-liter eating container
Add 250-500 ml of boiled water to eating container
Stir well (to ensure boullion dissolves) and cover for 5 minutes
Consume with a can-do attitude (it’s a big, filling meal for 1; a hearty snack for two)
I ate this 3 or 4 times in 14 days of dinners and never got tired of it. Since Thomas and I based all our meals on a 500 ml Jetboil volume, this was the one way I could think of to get the satisfaction of one of my favorite foods — pasta — with neither the risk of boiling water on a rolling for 10-15 minutes nor the waste of precious pasta water. The olives and tomatoes break up the otherwise monolithic texture of the couscous, the savory-salty boullion base is delicious, and the Parmesan holds everything together and provides the novelty of occasional melted cheese strings. This version is vegetarian, but a carnivore could add anchovies…
We were aiming for 5,000-7,000 Calories per day, so this meal was a solid third of my daily calories. It sometimes seemed like a daunting amount, but only once did I save ~1/4 of it for a snack later. (It’s totally fine, cold, too. Pasta salad!) Overall, this dinner weighs in at about 500 grams and delivers 9.2 megajoules of Race fuel. That works out to about 19.0 kJ/g which is well above carbohydrates (17 kJ/g) due to the fats in the olive oil and Parmesan cheese. (Olive oil has a specific energy of 37 kJ/g!)
For reference, milk chocolate has a specific energy of 22.85 kJ/g… So, I recommend the Ritter’s milk chocolate with hazelnuts for your R2AK dessert!
Anyone else care to share their favorite recipe? Add it in the comments.
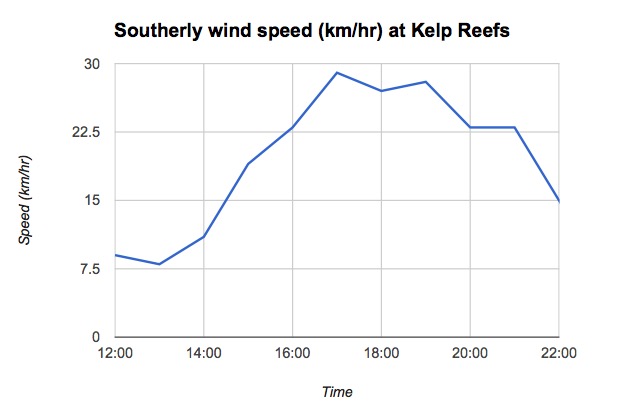
While most of the 2015 Race to Alaska (R2AK) was rather breezy, the very beginning of stage 2 (from Victoria to Ketchikan) offers an opportunity to compare the speeds of the diverse boat types in the fleet. Not only is sailing not allowed in the inner harbor of Victoria, but there was virtually no wind during the first couple hours of the Race. As the ebb tide weakened and the bulk of the fleet made the big left turn from the Strait of Juan de Fuca into Haro Strait, a light southerly filled in and the sailboat race began (see plot of wind speed at Kelp Reefs below).
Not until 2 p.m., a couple hours into the 2015 R2AK, did the southerly begin to flow up Haro Strait.
This near-calm period affords an opportunity to compare the speeds of the many different types of human-powered propulsion that were utilized by the 2015 fleet. Boats with a wide range of designs and displacements used oars while others tried 1- or 2-bladed paddles. A hand full of technological innovators used pedal-powered propellers or adaptations of the Hobie Mirage drive.
The fleet under human power along the shoreline south of Victoria. (Photo from r2ak.com)
While a more quantitative assessment is warranted (maybe with GPS Action Replay?), with the excitement of the 2016 upon us, I tried a simpler approach. Assume that everyone started at about the same time (high noon on Sunday June 7, 2015), that the whole fleet cleared Point Gonzales before any meaningful amount of wind set in, and that everyone experienced about the same set from the ebb. Here’s the current situation at Race Rocks for that day:
2015-06-07 Sun 5:14 AM PDT Sunrise
2015-06-07 Sun 5:38 AM PDT 0.6 knots Max Flood
2015-06-07 Sun 6:47 AM PDT -0.0 knots Slack, Ebb Begins
2015-06-07 Sun 11:12 AM PDT -5.3 knots Max Ebb
2015-06-07 Sun 3:05 PM PDT 0.0 knots Slack, Flood Begins
2015-06-07 Sun 6:09 PM PDT 5.3 knots Max Flood
2015-06-07 Sun 9:11 PM PDT Sunset
With those assumptions in place (and with the caveat that any ebb current would reduce the apparent speed of the R2AK boats as measured by their SPOT transceivers), I next measured the point-to-point distance from the Empress marina in the Inner Harbor of Victoria to Point Gonzales (just NE of Trial Islands). It’s ~10.5 km. I then used the R2AK tracker re-play function to estimate the time that each boat passed Point Gonzales. (This is a little tricky due to the 15 minute location interval, but if we assume constant speed during those 15 minutes we can approximate the time at which a boat passed the Point to within a minute or two.)
The range of speeds (5.0-2.0 knots, or 9.3-3.7 kph) is not that big — though it feels substantial when you’re getting passed by someone on the course, or trying to catch up to a boat that’s “just ahead!” I certainly recall being appalled at how fast the Soggy Beavers (44′ OC-6, mean speed 5.0 knots) overtook our 17′ catamaran (pedal+paddle power, mean speed 3.7 knots) in the first few minutes of the race (see below)! [There’s no data for 2 boats that had SPOT trackers that weren’t working during the start.]
Six-minutes after the bell, the Soggy Beavers pass Team Sea Runners on route to set the Point Gonzales speed record: 9.26 kph. They passed Point Gonzales just one hour and 8 minutes into the 2015 Race to Alaska.
The fastest boat (Team Soggy Beavers) was a long, narrow, lightly-loaded hull propelled by Canadians using the most tried-and-true technology on the Pacific Northwest coast: the canoe paddle. The next three fastest boats used pedal drives, assisted in some cases by a paddle: Hexagram 59 was relentless in their use of a supplementary SUP paddle (always on the port side!); Sea Runners occasionally took vigorous strokes with a canoe paddle. Turn Point Design had a carbon fiber cat driven by the largest prop among the pedal-powered boats.
One interesting pattern is that the 7 top speeds were obtained with less traditional methods (not rowing). After them, came the three fastest boats that were rowed: the Boatyard Boys (small boat, strong rowers; coincidentally almost matched by Team Mau with an athwartship pedal system), Elsie Piddock (the winners of the windy 2015 R2AK), and MOB Mentality. This pattern hints that there are still speed gains to be made by both rowers and technological innovators. This year Colin Angus and Mathieu Bonnier will bring a LOT of rowing experience to the race.
And Matt Johnson will bring some serious pedal power. His interest in pedal-powered boats is partly fueled by an interest in breaking the World record for 24-hour distance in a human powered boat. This Google spreadsheet of human-powered boat speed records and measurements shows how high the bar has been set over the years — primarily by pedal boats and kayakers. The speeds maintained over 24-hours have been creeping up over the decades. Kayaks have gone from 8.04 kph in 1988 to 10.15 kph in 2013, while pedal-powered boats have increased dramatically from 3.76 kph in 2000 to 10.22 in 2008.
Overall the 2015 R2AK boat speeds over those first 10.5 km bracket the speeds maintained over long distances by rowers and kayakers (3-5 kph; e.g. Colin and Julie rowing across the Atlantic averaged 3.9 kph). But the upper R2AK speeds aren’t far from the World record paces of pedal-boater Greg Kolodziejzyk (10.5 kph) or Bellingham-based kayaker Brandon Nelson (10.22 kph). The top sprinting speeds achieved historically indicate an upper edge of what current technology may soon deliver over a long course like the R2AK (ignoring factors that limit human endurance): 17.6 kph for Gordie Nash in a pedal boat; 20.55 kph (11 knots!) for Olympic kayak men’s K4 sprint.
Who do you think will beat the “Point Gonzales record” (of 5 knots) this year?
For the competition to be “fair” from year to year, the current situation should be about the same. It looks like Jake did a good job of leveling the playing field:
2016-06-26 Sun 5:14 AM PDT Sunrise
2016-06-26 Sun 5:26 AM PDT 0.0 knots Slack, Flood Begins
2016-06-26 Sun 6:47 AM PDT 0.9 knots Max Flood
2016-06-26 Sun 8:24 AM PDT -0.0 knots Slack, Ebb Begins
2016-06-26 Sun 12:18 PM PDT -4.2 knots Max Ebb
2016-06-26 Sun 3:57 PM PDT 0.0 knots Slack, Flood Begins
2016-06-26 Sun 6:55 PM PDT 4.5 knots Max Flood
2016-06-26 Sun 9:19 PM PDT Sunset
The slack will come about an hour later this year, but the max ebb is about a knot less than last year. May the best technology and most powerful racer win!
The Race to Alaska (R2AK) is an un-supported challenge in which reliable communication and navigation is important, but energy supplies are often limited. Many of the smaller boats want to be light to make sailing or human propulsion faster, so taking tons of batteries isn’t an option. Solar charging systems can be limited by inclement weather. And getting wet is pretty much guaranteed on a small (<20′) boat.
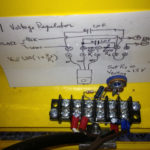
Electrical system for cruising 21′ cat and Team Puffin (R2AK 2015, ~9.0 kg):
Here’s the system that Team Puffin used in the 2015 R2AK. This set-up was derived from systems that were used aboard the same Wharram Tiki 21 sailboat (“Milagra”) during summertime cruises over the last 5 years.
Pelican case (45 cm long x 35 cm deep x 18 cm thick; with wooden dividers/brackets glued in using Shoe Goo)
Dual cigarette lighter jacks (with covers to keep out spray/salt/etc)
10W solar PV panel
5-45W charge controller
12 AH motorcycle battery
Here’s some pictures of it in action during the cruising era:
Typical cruising loads as well as the loads required by Team Puffin were served through USB chargers that fit the cigarette lighter jacks. The main power demands were for:
iPhones (with Navionics, MarineTraffic, and other apps)
VHF radio (plus a back-up)
iPad (only aboard with Team Puffin, and not used much as iPhones sufficed)
Electrical system for Team Take Me to the Volcano (R2AK 2016; ~7.8 kg)
The Tiki 21’s electrical box is being modified for use by Team Take Me to the Volcano in this year’s (2016) Race. Matt’s main charging needs are:
VHF (plus a back-up)
Phone
Lithium-ion battery pack (a 20,000 mAH one costs ~25$ now! that’s 20 AH, so seems cost effective compared to larger motorcycle-sized lithiums…)
Most other items will be powered by disposable (mostly lithium AA) batteries:
Based on these comparisons, here are the main modifications and improvements we are making:
Lighten up the whole system by switching from lead-acid to a lithium battery, and possibly by using a less rugged waterproof case (new Pelican Air 1485 of sufficient outer dimensions is 2.1 kg, saving about 800 grams over current case)
Add energy storage by using “bricks” now mass produced for recharging phones/etc that are charged via the USB ports
Solder, stabilize, and marine-ize all wiring, terminals, and components
How will you power your R2AK? Here’s the system undergoing transformation from Team Puffin (2015) to Team Take Me to the Volcano (2016).
Here’s the final result. This may still be too heavy for Matt to use in the R2AK, but it is an incremental improvement in the cruising system I’ll use aboard the Hitia 17 or Tiki 21.
The new and improved electronics box.
The main changes were:
Lowered total mass by about 2.0 kg overall.
The big savings of 2.1 kg was from switching from Pb-acid to lithium iron phosphate battery. We take a little hit in capacity (going down from 12 to 9 Ahr), but presumably that can be supplemented by adding a USB lithium battery brick.
Considered a Pelican Air, but the mass savings for the smallest that would fit the 10W panel was only 500 g.
The Bioenno charge controller added ~110 grams over the BatteryTender one (but I hope it handles load vs battery maintenance more intelligently…
I re-sealed the holes in the case with Tap Plastic’s recommended 2-part glue for polyethene (adding some glue mass, but simplifying the seal of a big historic hole in a way that reduced mass a bit).
Testing extra capacity with Matt’s Aukey 20 Ahr brick, but may end up using a smaller one that I own…
All wires are now terminated, soldered, and heat shrink tubed. Battery, controller, etc are also much more secure — either lashed, screwed, or velcro-ed down. I was surprised to see how much electronic complexity is inside the charging base for the VHF. In a feeble effort to protect it, I added some shoe-goo to the perimeter of the base cover which is otherwise just held on by a single central (tiny) screw. An added benefit of glue-screwing the base to the wooden board (which I moved and glued to the handle/edge) is that now the VHF can be used (for listening to weather, or even transmitting while plugged into the charger…
It’s not a simple connection of the 12V wires to the radio!
LiFePO4 battery details
I ran into two tricky bits in implementing the lithium battery upgrade.
First, not all lithium iron phosphate batteries are the same. Some are aimed at maximizing lithium cranking amps (LCA) while others can tolerate deep cycling. While batterytender.com offered an attractive lithium option (12V, 120 LCA, 0.5 kg, $100), they emailed to say that it really wasn’t appropriate for deep cycle use in a marine setting. After searching around (and finding this very interesting Canadian electrical engineer who is making a solar charge controller for lithium PO4 battery banks), I ended up at BioEnno Power looking at their 12V series of LiFePO4 batteries about which they say:
These are Deep-Cycle Batteries for extended continuous use, not to be confused with High-Rate Batteries which are for starter applications only and not for extended continuous use.
Second, the weight savings seemed to vary a lot depending on the LiFePO4 battery manufacturer, or possibly the intended application: deep cycling vs high-rate. For example the Battery Tender 12V/120LCA battery (which they bill as equivalent to a 7-9Ah Pb-acid battery) weighs 0.5 kg which is is ~1/7 the mass of the current Pb-acid battery’s 3.3 kg. In contrast, the BioEnno 12V/9Ah battery has a mass of 1.18 kg — about 1/3 of the Pb-acid mass. Even the 240LCA () Battery Tender option weighs only 0.8 kg (1/6th Pb-acid mass). What could account for this factor of ~2 difference in LiFePO4 battery mass? (Bolted vs welded connections between cells?)









































{kind=link}